
前面几期《指南》中,我们分别介绍了研控EtherCAT总线(后文简称“E总线”)驱动器与倍福、欧姆龙、基恩士、松下主站的连接步骤及注意事项。
这次,我们将重点介绍研控E总线驱动器与正运动EtherCAT主机的连接步骤,可用于研控现有的11款E总线驱动器,以及即将发布的AS3-BNI系列伺服驱动器,希望对您有所帮助!
本文介绍如何使用“正运动主站控制器的EtherCAT主机(EtherCAT总线运动控制器)”及其上位编程开发软件“ZDevelop.exe”连接并控制YAKO的EtherCAT总线驱动器。
【按照步骤操作后,可以使用该上位编程开发软件的开发程序,通过YAKO的EtherCAT总线驱动器来控制电机运动。】
如需了解更高级的运动控制功能,请咨询深圳正运动技术有限公司的相关技术人员。
本《指南》适用于全系列:正运动主站控制器EtherCAT主机(EtherCAT总线运动控制器)、YAKO EtherCAT总线驱动器和配套电机。
请注意:
本文运动控制器以正运动ZMC464为例,驱动器以“研控混合伺服MS-Mini3E”为例,因此文中操作界面的相关产品型号会显示为“ZMC464”、 “MS-Mini3E”,但本指南适用于研控全系列EtherCAT总线驱动器。
二、连接指南(正文内容)












附录: EtherCAT总线运动控制器(主站)和EtherCAT总线驱动器(从站)的程序。
定义EtherCAT总线变量▼
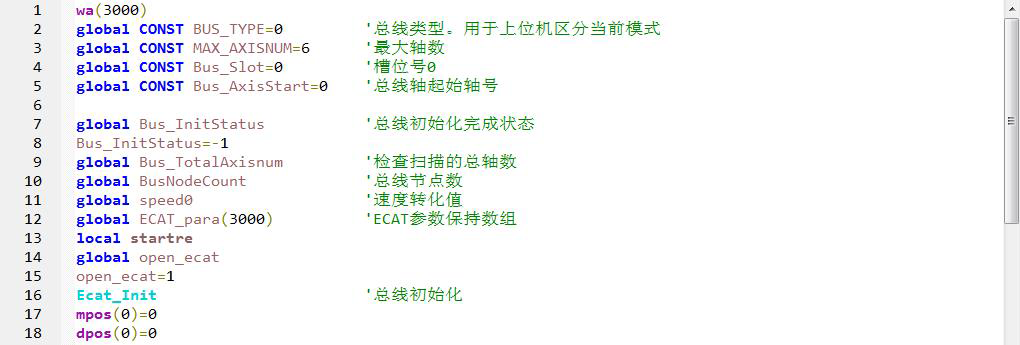
打开EtherCAT总线通信▼


定义运动变量▼

主站CSP模式应用案例▼



从站速度(PV)模式应用案例▼
模式应用案例")
从站位置(PP)模式应用案例▼
模式应用案例")
模式应用案例")
从站回零(HM)模式应用案例▼
模式应用案例")


